
System of Particles and Rotational Motion
NCERT Chapter 6 • Centre of Mass, Torque, Moment of Inertia & Rolling
1. Centre of Mass (CM)
The Centre of Mass of a system of particles is the point that moves as if all the mass of the system were concentrated at that point and all external forces were applied at that point.
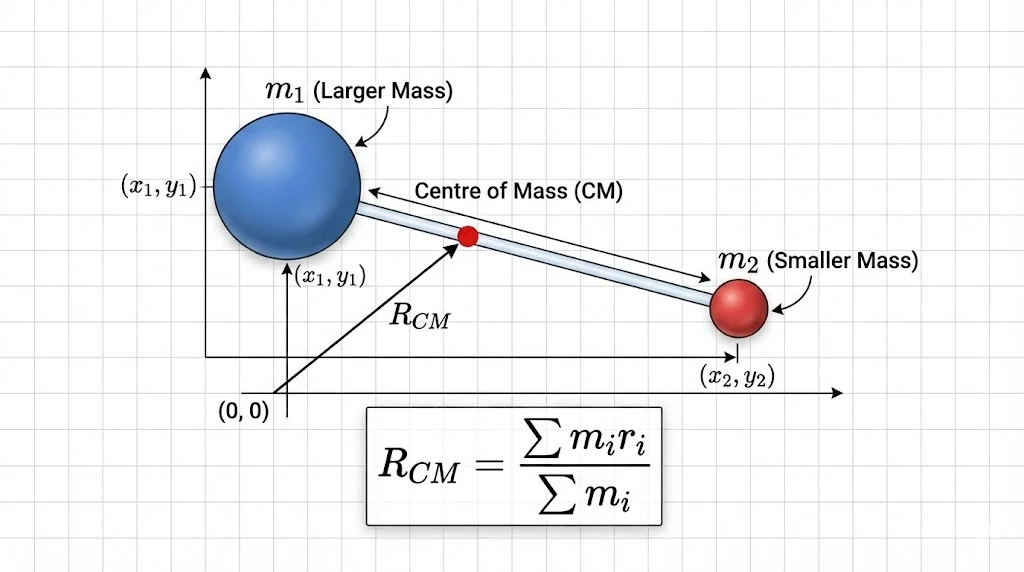
1.1 Formula for CM
For a system of  particles with masses
particles with masses  at positions
at positions  :
:

For a two-particle system (on x-axis):

1.2 Motion of the Centre of Mass
The velocity of the CM is given by:

Differentiating again, we get Newton’s Second Law for a system:

This means the CM moves as if all the mass were concentrated at that point and all external forces acted there.
In an exploding projectile, internal forces cause fragments to fly apart, but the CM continues on the original parabolic trajectory because  remains unchanged.
remains unchanged.
1.3 Conservation of Linear Momentum
If the net external force on a system is zero ( ), then:
), then:

This principle explains recoil of guns, motion of binary stars, and radioactive decay.
The CG is the point where the total gravitational torque is zero. For small bodies in a uniform gravitational field, CG coincides with CM. For large bodies (e.g., mountains), they may differ.
Show Answer
 .
. .
.CM is at
 .
.
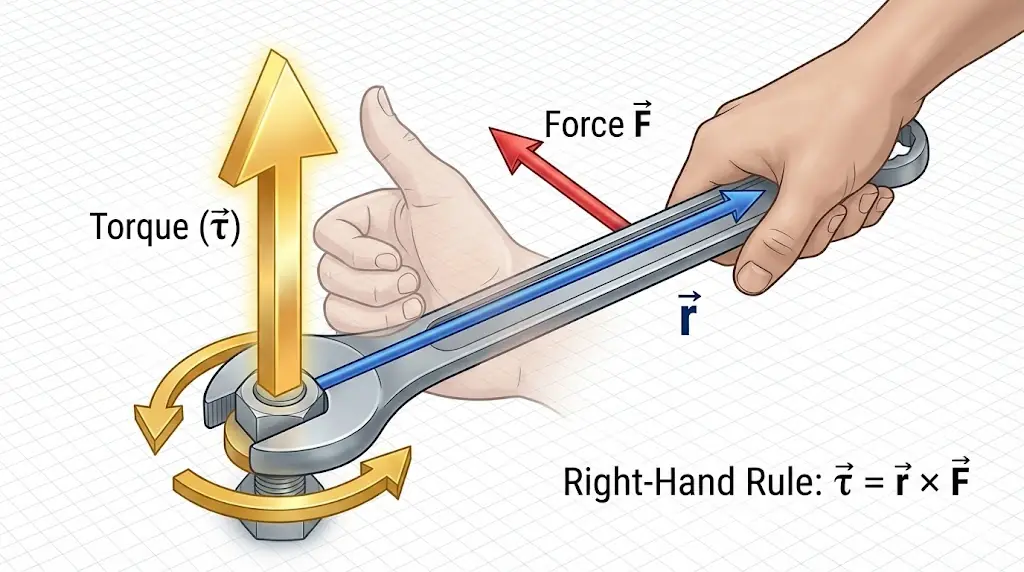
2. Vector Product (Cross Product)
To describe rotation, we use the vector product. For two vectors  and
and  :
:

Where  is a unit vector perpendicular to both and given by the Right-Hand Rule.
is a unit vector perpendicular to both and given by the Right-Hand Rule.
1. Not Commutative: 
2. Parallel vectors: 
3. Rotational Kinematics
The equations for rotational motion with constant angular acceleration ( ) are analogous to linear motion.
) are analogous to linear motion.
Linear ( ) ) |
Rotational () |
|---|---|
 |  |
 |  |
 |  |
Relation between Linear and Angular Variables

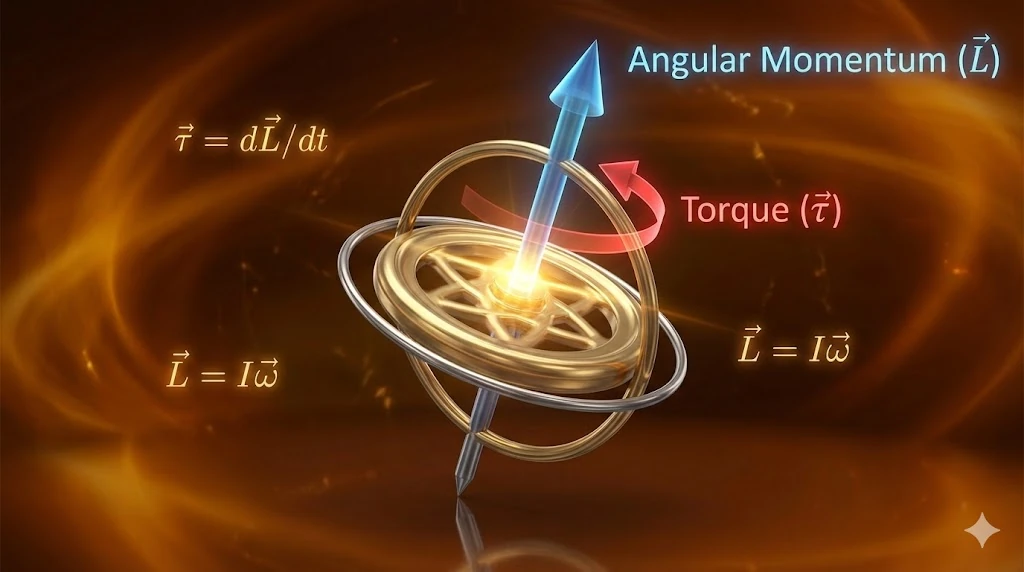
4. Torque and Angular Momentum
4.1 Torque ( )
)
 )
)Torque is the “turning effect” of a force. It is the moment of force.
 ) is the turning effect of a force.
) is the turning effect of a force.
4.2 Angular Momentum ()
Angular momentum is the rotational equivalent of linear momentum.

For a rigid body rotating about a fixed axis,  .
.
4.3 Relation between Torque and Angular Momentum
 3 Marks
3 Marks

 .
. .
.
 .
.
 and
and  . So,
. So,  (Parallel).
(Parallel). (Newton’s 2nd Law).
(Newton’s 2nd Law).
 .
.
4.4 Conservation of Angular Momentum
If the net external torque on a system is zero ( ), then
), then  , which implies
, which implies  .
.
A spinning ice skater brings her arms in (decreasing Moment of Inertia  ). To conserve
). To conserve  , her angular speed
, her angular speed  increases.
increases.
5. Equilibrium of a Rigid Body
For a rigid body to be in mechanical equilibrium, two conditions must be satisfied:
- Translational Equilibrium: Net external force is zero ().
- Rotational Equilibrium: Net external torque is zero ().
 ).
). ).
).5.1 Principle of Moments
For a lever in equilibrium, the sum of clockwise moments equals the sum of anticlockwise moments:

This is the basis of balances and see-saws. The mechanical advantage is  .
.
6. Moment of Inertia ()
Moment of Inertia is the rotational analogue of mass. It measures the resistance of a body to change its rotational motion.


6.1 Theorems of Moment of Inertia
 .
.Example: For a disc,
 , so
, so  .
.
 , where
, where  is distance between axes.
is distance between axes.Example: For a rod about one end:
 .
.
Radius of Gyration ()
 )
)The distance from the axis where the entire mass  can be assumed to be concentrated to give the same Inertia.
can be assumed to be concentrated to give the same Inertia.

Common Moments of Inertia
| Body | Axis | I |
|---|---|---|
| Thin Ring | Center (Perpendicular) |  |
| Disc | Center (Perpendicular) |  |
| Solid Sphere | Diameter |  |
| Hollow Sphere | Diameter |  |
| Rod (Length L) | Center (Perpendicular) |  |
Dynamics of Rotation
Just as  , for rotation we have:
, for rotation we have:

Work and Power in Rotation
Work done by torque:  .
.

Rotational Work-Energy Theorem:  .
.
Show Answer
Torque Nm.
Nm.Inertia (Solid Cylinder)
 kg m².
kg m². rad/s².
rad/s².
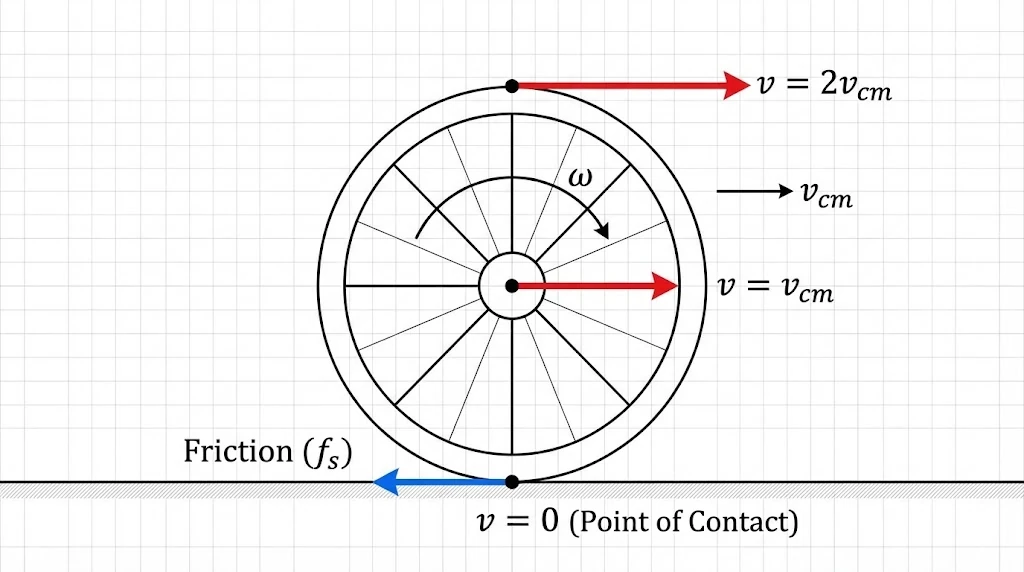
7. Rolling Motion
Rolling without slipping is a combination of Translation and Rotation.

Kinetic Energy of Rolling
Total KE = Translational KE + Rotational KE


7.1 Rolling Down an Incline
For a body rolling down an incline of angle  , the linear acceleration is:
, the linear acceleration is:

This shows that for the same  and
and  , the body with smaller (e.g., solid sphere) accelerates faster.
, the body with smaller (e.g., solid sphere) accelerates faster.
7.2 Role of Friction in Rolling
Friction provides the torque for rotation. Its direction depends on the situation:
- Accelerating car: Friction on driving wheels acts forward.
- Braking car: Friction acts backward.
- Pure rolling at constant speed: Friction is zero.
The condition for rolling without slipping is  .
.
Show Answer
Acceleration .
.Solid Sphere:
 .
.Hollow Sphere:
 .
.Since Solid Sphere has smaller
 , it has larger acceleration and reaches first.
, it has larger acceleration and reaches first.